Overview
As we start to spend more time with robots in our everyday lives, we need robots that are more compatible with us fleshy humans. Since humans don't appear to be evolving to become less squishy anytime soon, the solution is to make squishy robots!
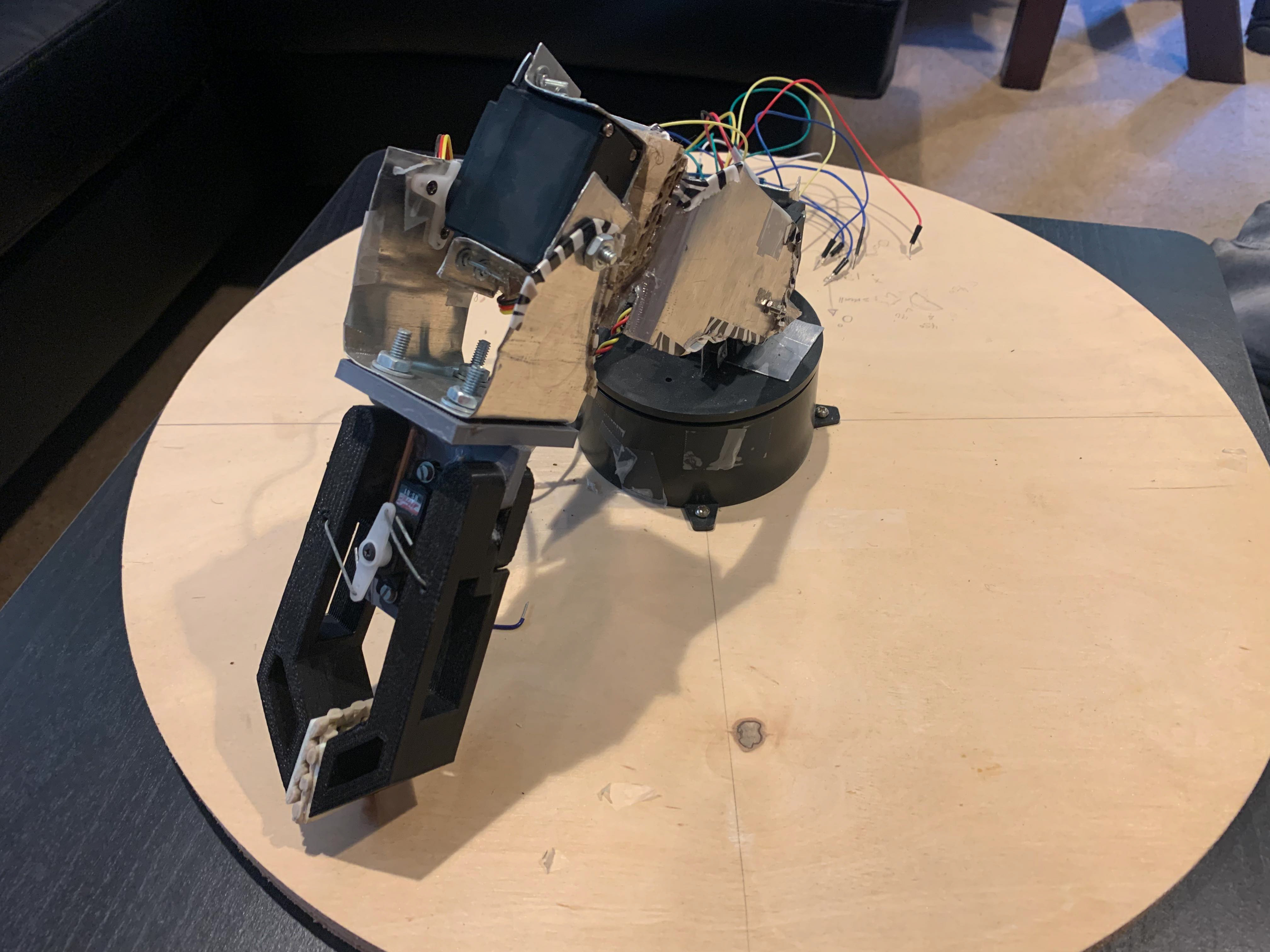
My exploration into soft robotics culminated in the design of a "soft gripper," using 3D printed pieces, plastic covers, and vacuum suction to actuate.
Demo
Although the current pumping system is somewhat slow, a more efficient pump could lead to faster actuation.
The claw was able to grip a variety of objects but was limited with heavier objects due to the limited strength of the vacuum seal.
Inspiration
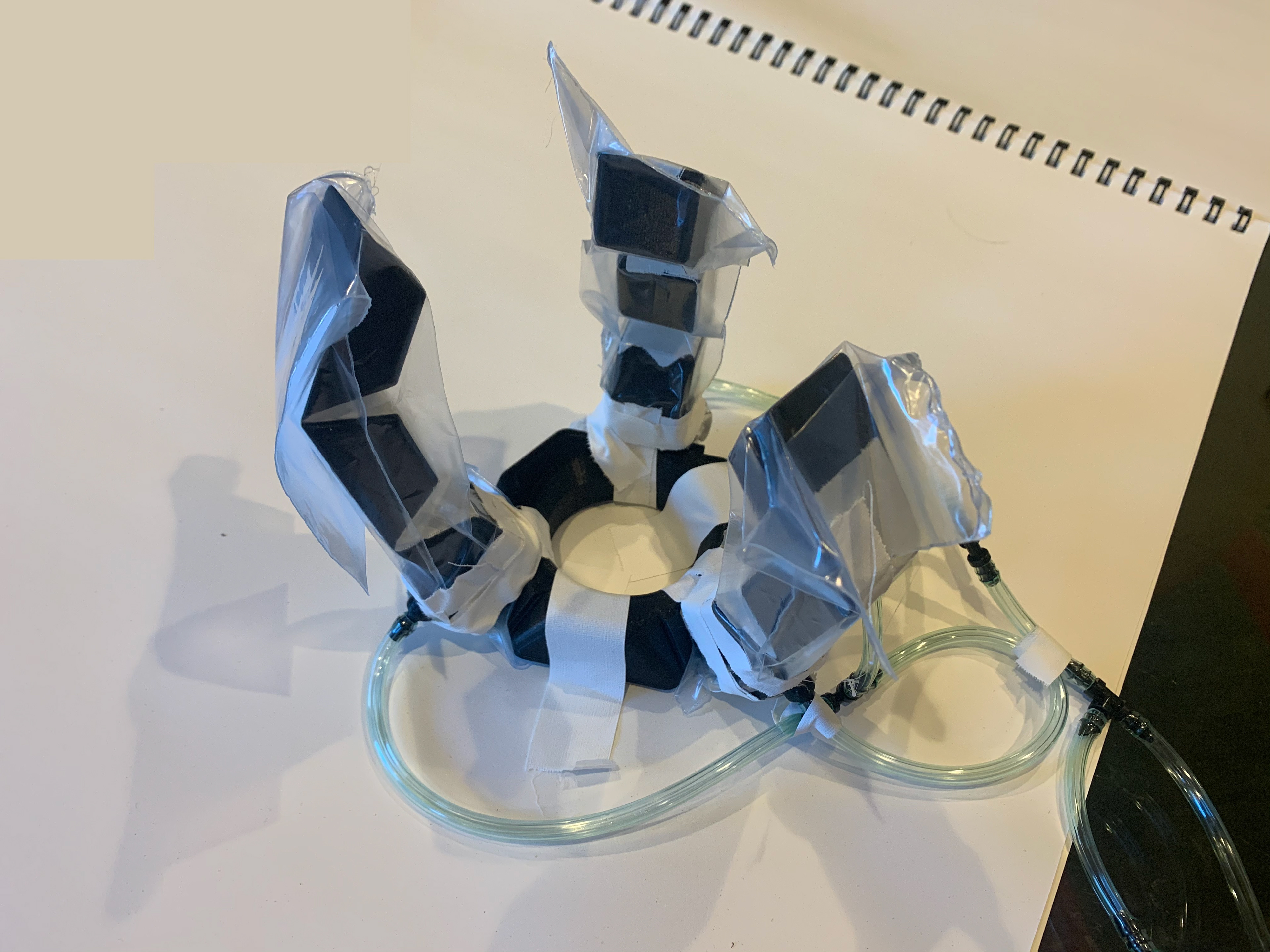
I was first inspired by a research paper on soft artificial muscles published by Harvard's Wyss Institute. What grabbed my attention was the relative ease of manufacturing to make each artificial muscle.
Each muscle only needs a material to serve as a hard internal skeleton and a material to serve as the skin, strong enough to hold a vacuum seal.
Seen to the right is one of the artificial muscle creations that would have a heavy influence on my final claw design.