Overview
This project was a result of a class challenge to create a robot capable of navigating a maze without prior knowledge of the layout.
I was responsible for the controls and programming side of the project. The main control code is written in python while the user interface is controlled via a webpage.
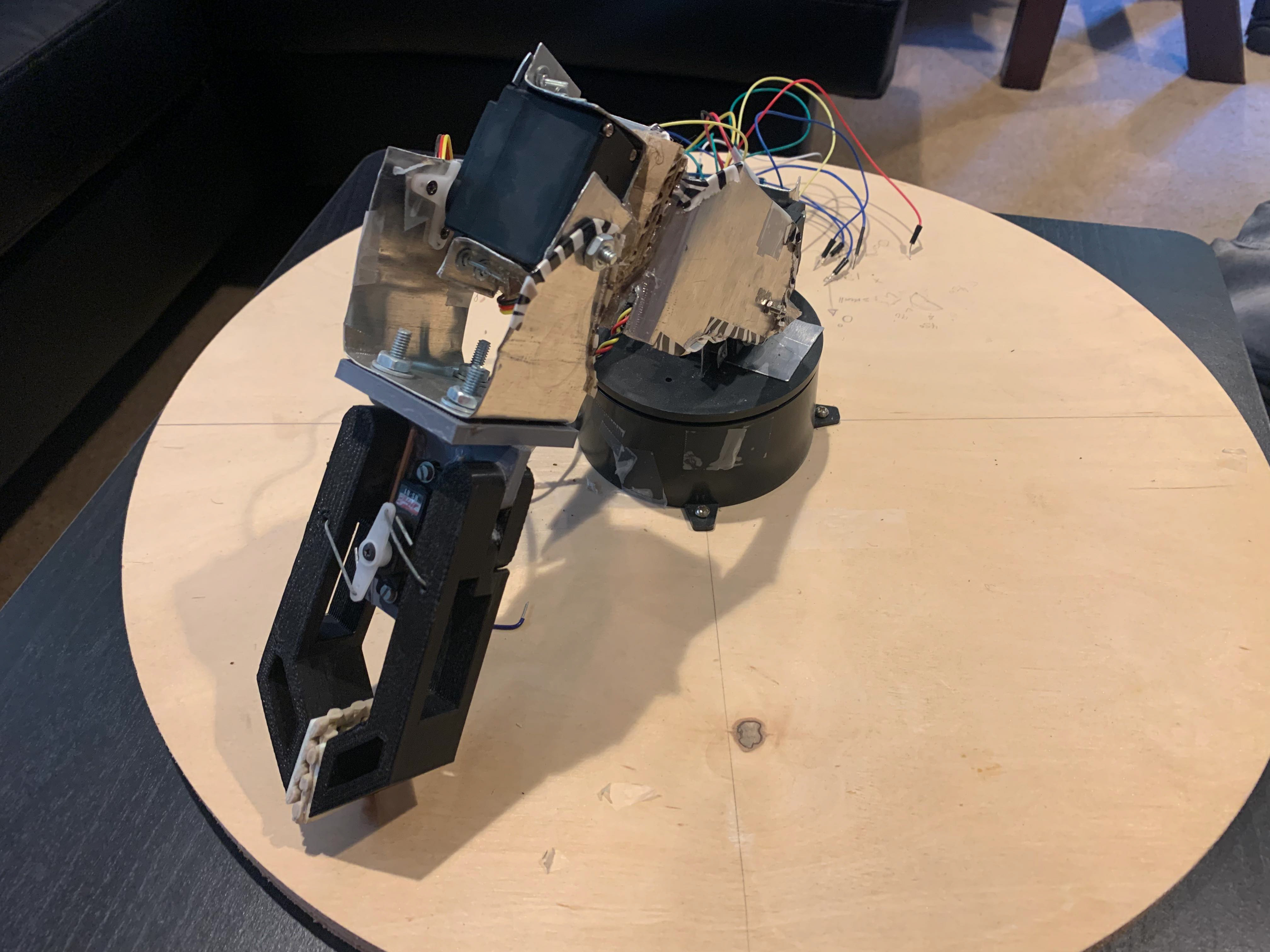
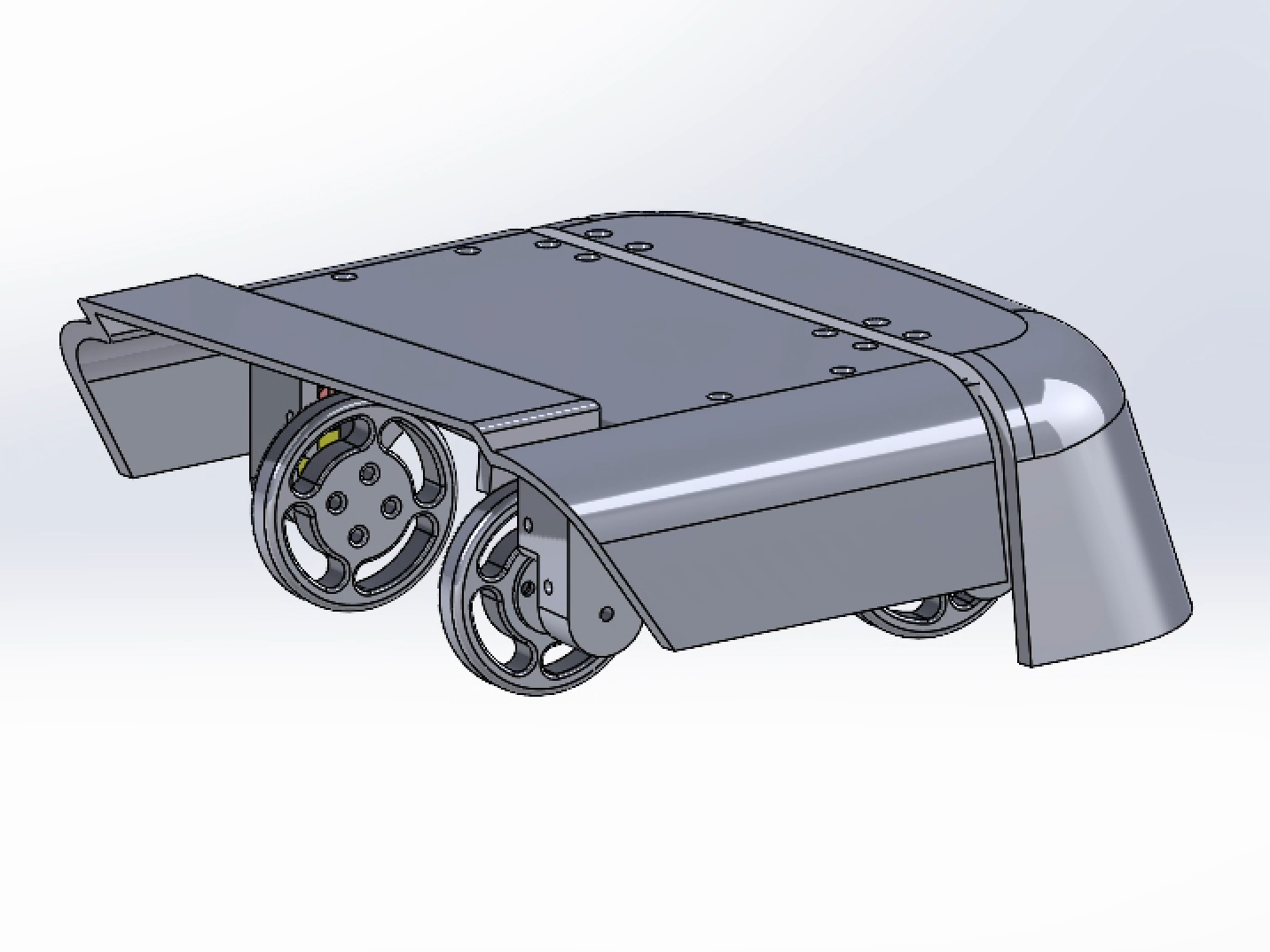
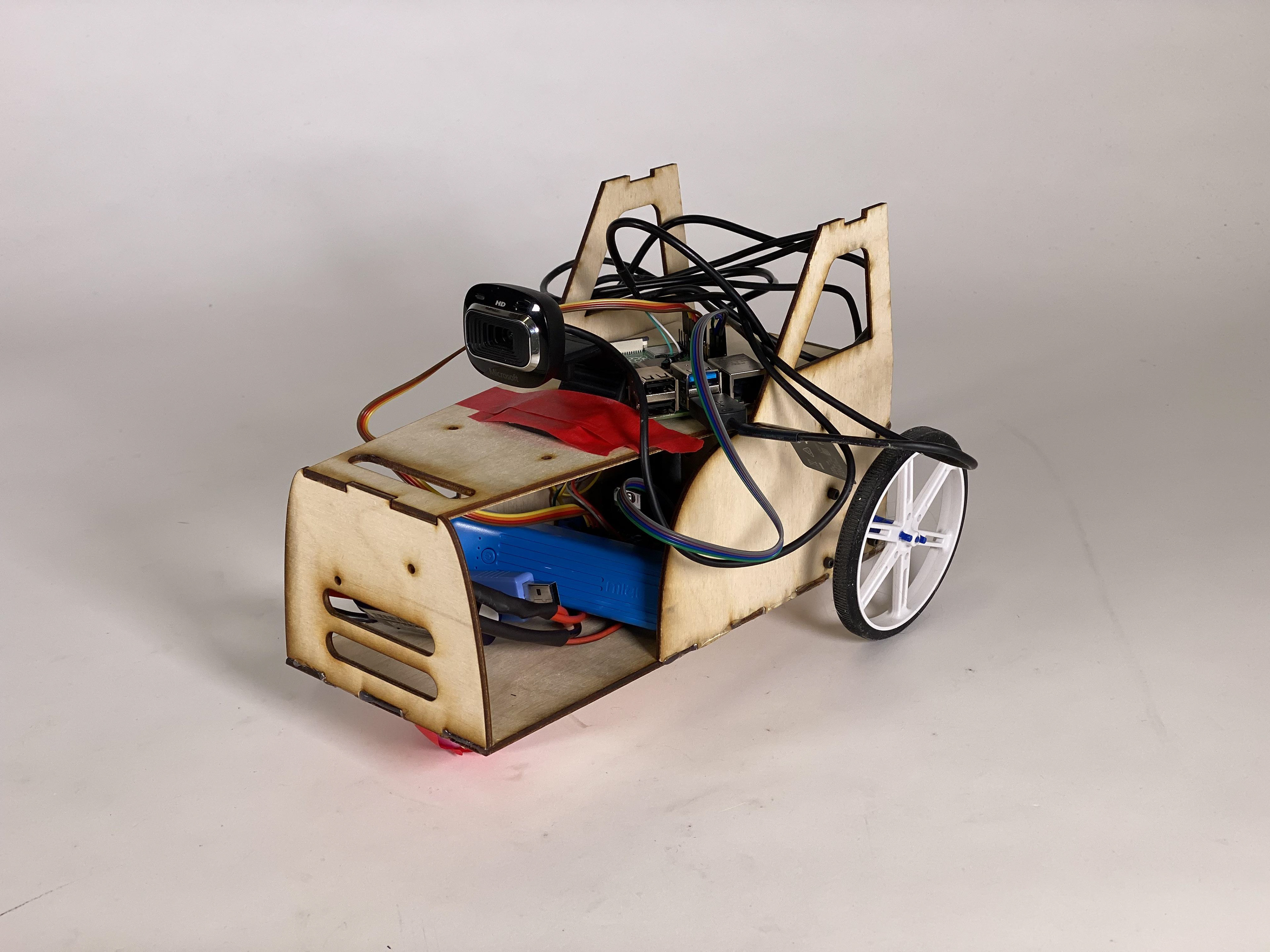
External View
Camera View
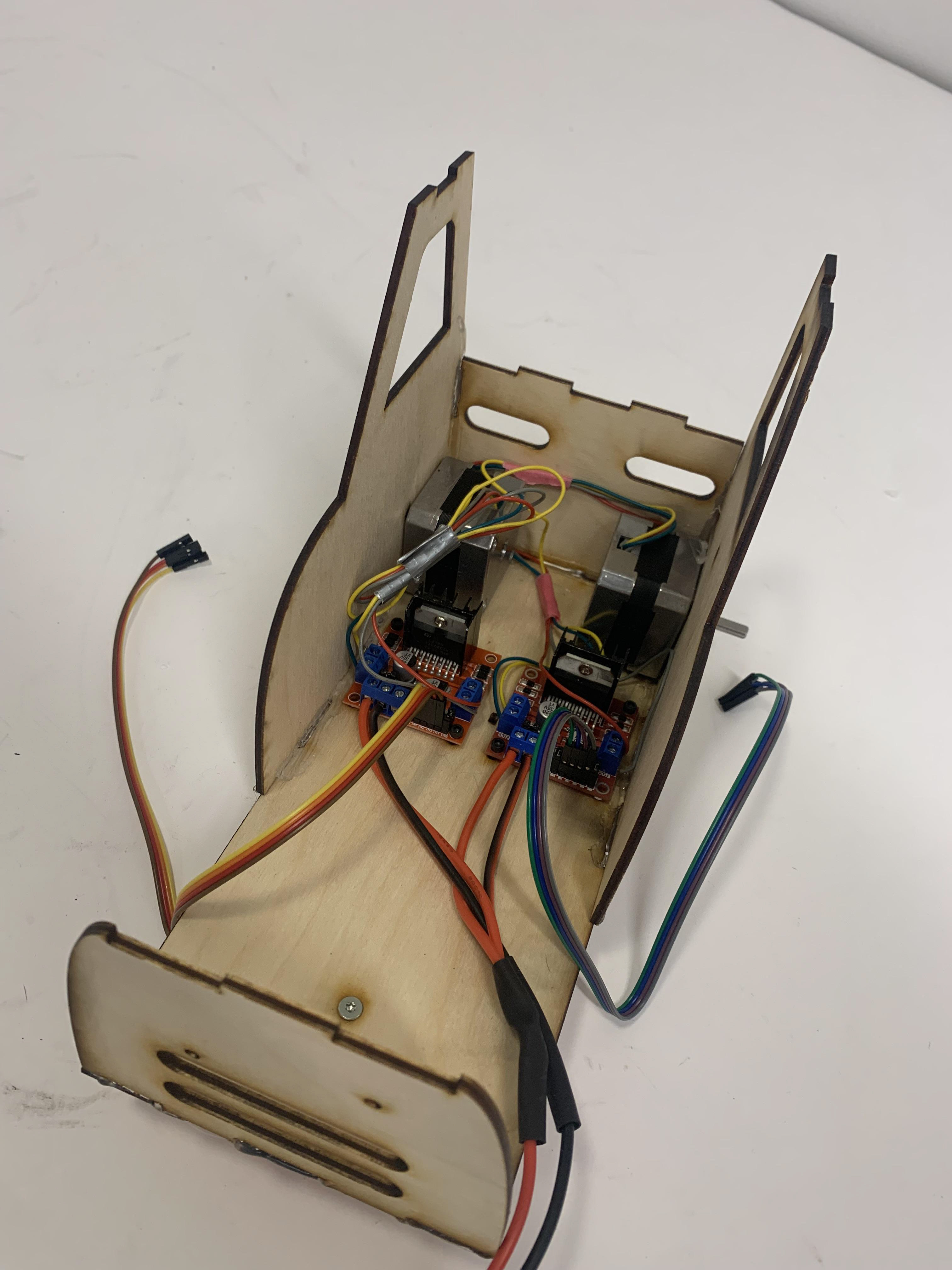
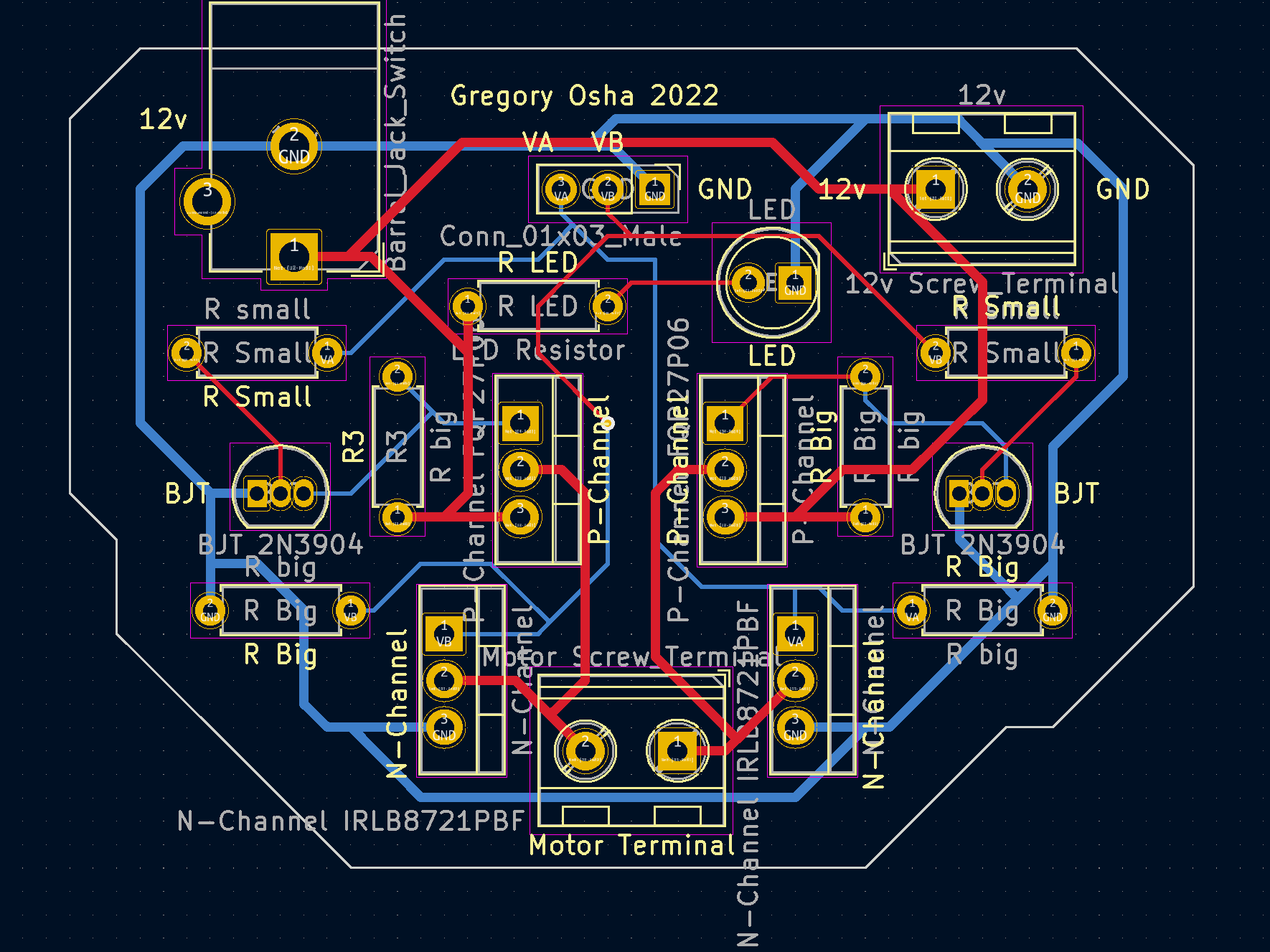
Electronics Design
The internal design is fairly straightforward; it uses a Raspberry Pi to drive two stepper motors via motor controllers. The entire system is powered by a single 7.4v LiPo battery.
The front wheel is a small ball caster, simplifying the drivetrain.
Control Code
The code can be found here: https://github.com/gregoryosha/electronics_raspberrypi
The main system is split into two main processes: one that constantly reads input from the user via GET requests and another that gives commands to the stepper motors. These are split up via multiprocessing but share certain variables so user input can reach the electronics.