Overview
Shadow Mirror is an interactive robotic art display, brought to life by 576 active servo motors. By sliding wood slats in or out of the front face, the mirror displays the live silhouette of the viewer standing in front of the installation.
This project was built jointly by me and Gabe Moussa, a fellow mechanical engineering undergrad, over the course of our Junior and Senior years at Tufts University. Although we had a lot of help from friends along the way, we had no faculty mentor, and this was not completed for a class project.
Shadow Mirror was installed in Tufts University's Tisch Library for the duration of our 2024 spring semester.
Our Friends and Community
This project wouldn't have been possible without the support of the Tufts community. Without funding from the Robotics Club, installation help from the Tufts Art Collection managers, a workspace in Nolop, and support from our friends we never would have been able to finish this fantastic project.
We're so glad that the Tufts community enjoyed "Shadow Mirror" almost as much as we did. You can read about it from these places:
We're so glad that the Tufts community enjoyed "Shadow Mirror" almost as much as we did. You can read about it from these places:
Tufts School of Engineering: "Blending Art and Engineering"

Communication Pathway
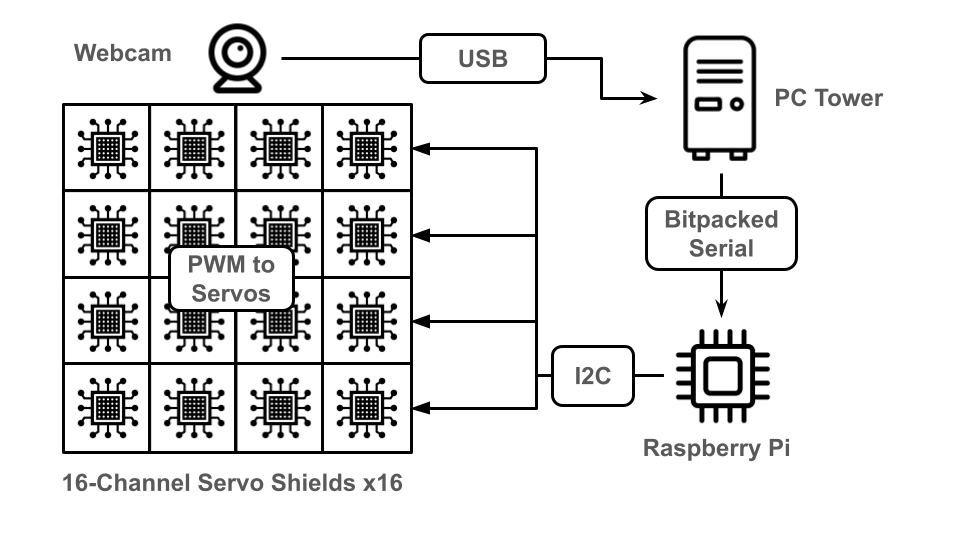
First, the webcam would capture a raw image. Next, Google's Mediapipe API would process this to extract the silhouette. My Python script would take this, pixelate it, and turn it into a bit array. This could be packed into a very small piece of data, as each servo was either 1/0. The Raspberry Pi then sent the command data to the servo shields. Lastly, only the servos that needed to change their position would be communicated to.
Demo
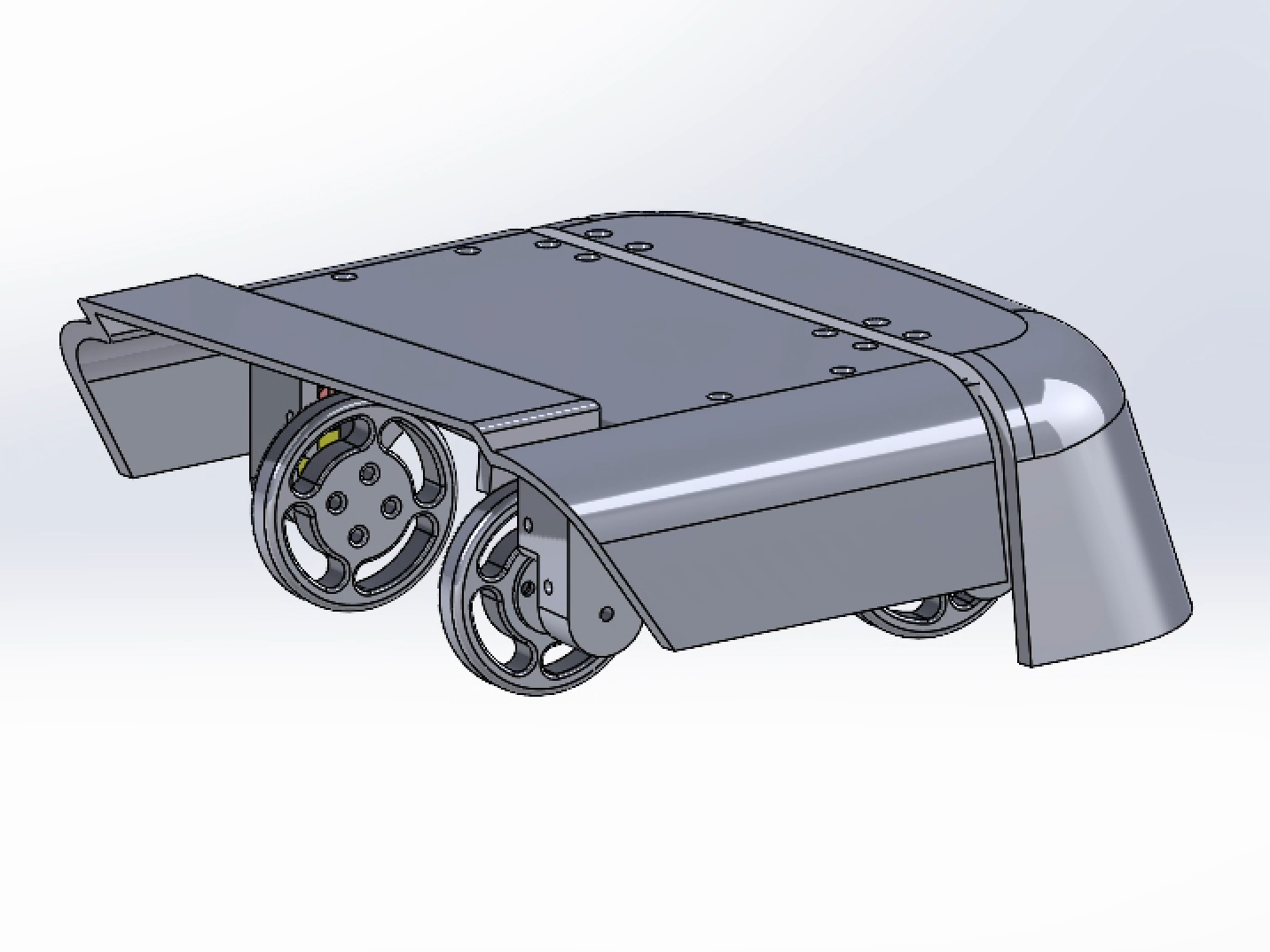
Each slat was controlled by a single laser-cut gear press fit to the servo. Here was an example test of running the servos in series and stress testing the design. We were initially unsure of how durable the press fit would be, and ran several boxes over a period of time to see.
Early test of the pixelation and silhouette isolation.